Om CRIMAC
Hovudmålet til CRIMAC er å vidareutvikla fagfeltet fiskeriakustikk med tilhøyrande optiske metodar, og å nytta metodane innan 1) marin forsking, 2) fiskeri, 3) akvakultur og 4) energisektoren. Arbeidet er delt inn i følgjande delmål:
- Forbetra automatisk tolking av (breidbanda) fiskeriakustikk, inkludert dimensjonering av mål (fisk og bobler), målidentifikasjon og auka romleg oppløysing.
- Hjelp til målklassifisering av fisk og dyreplankton ved eksperimentelle målingar av kjente mål og ved modellering av ekkoet.
- Samla inn referansedata for maskinlæringsprosjekt på forskingsfartøy og i kommersielt fiskeri med tilsvarande, kalibrert instrumentering.
- Utvikla betre verifiseringsmetoder ved å nytta optiske system, prober og arbeidsdronar.
- Utvikla automatiserte klassifiseringssystem basert på moderne maskinlæringsmetodar.
- Samarbeid med brukarpartnarane for å nytta teknikkane og instrumenta utvikla i 1) til 4), i vitskaplege undersøkingar, for dimensjonering og artsklassifisering i fiskeri, for dimensjonering, vekst og åtferdsmålingar i akvakultur, og forbetra gass- og bobledeteksjonssystem for energisektoren
WP1: Forstå breidbanda ekkosignal
Ansvarleg: Geir Pedersen
Forskingsspørsmål: Korleis vert breidbanda ekko generert frå ulike marine organismar?
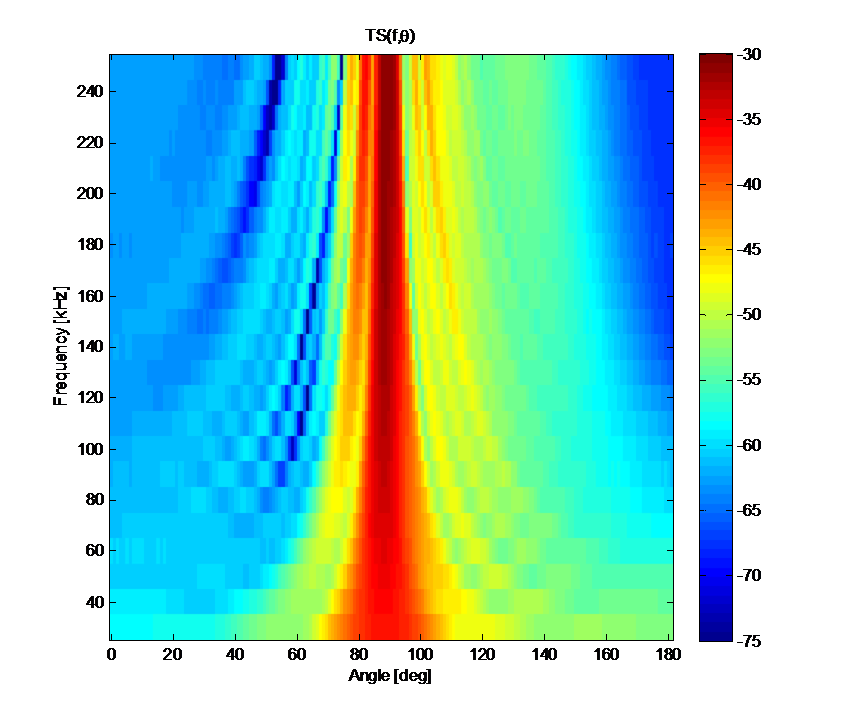
Arbeidet vil fokusera på å forstå korleis komplekse breidbands-frekvensresponsar frå marine organismar vert generert, og korleis vi kan auka informasjonen vi kan henta ut frå signala. Forsking på akustisk modellering av breidbandssignal og utvikling av signalbehandlingsmetoder for breidbandsdata vil hjelpa oss til å svara på det.
Både målingar (WP2) og modellering (WP1) vert nytta til å forstå komplekse breidbanda frekvensresponsar. WP1 vil evaluere tilgjengelege modellar, med fokus på numeriske modeller. Inndata til desse modellane er data frå røntgen, CT-skanning og MR-skanning av representative organismar. Der det er mogeleg, vil potensielle nye implementeringar bli utvikla i opent tilgjengelege programmeringsspråk (til dømes. Python og R).
WP1 vil teste og vidareutvikla signalbehandlingsmetodar og protokoller. Dette inkluderer å trekka ut informasjon i smale band frå breidbanda data, ekkointegrasjon frå breidbanda data, standard effektinnstillingar for å redusera ikkje-lineære effektar, forbetra kalibrering, nye pulsformer og metodar for fjerning av støy
WP2: Eksperimentelle målingar
Ansvarleg: Tonje N. Forland
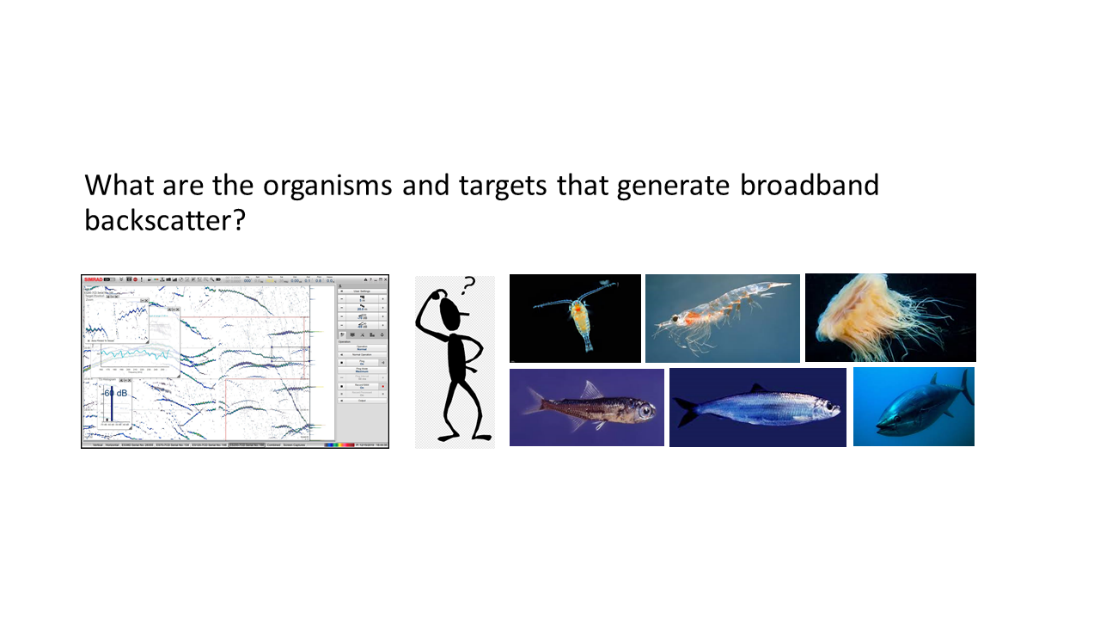
Forskingsspørsmål: Kva er breidbandssignala frå ulike marine organismar?
Denne arbeidspakken vil utvikla metodar for kontrollerte målingar av breidbanda frekvensresponsar frå ulike mål. Viktige kategoriar av mål er fisk, gassbobler, fiskelarvar, krill, copepodar og manetar. Eksisterande kunnskap om desse organismane vil verta gjennomgått og nytta til å prioritera innsatsen.
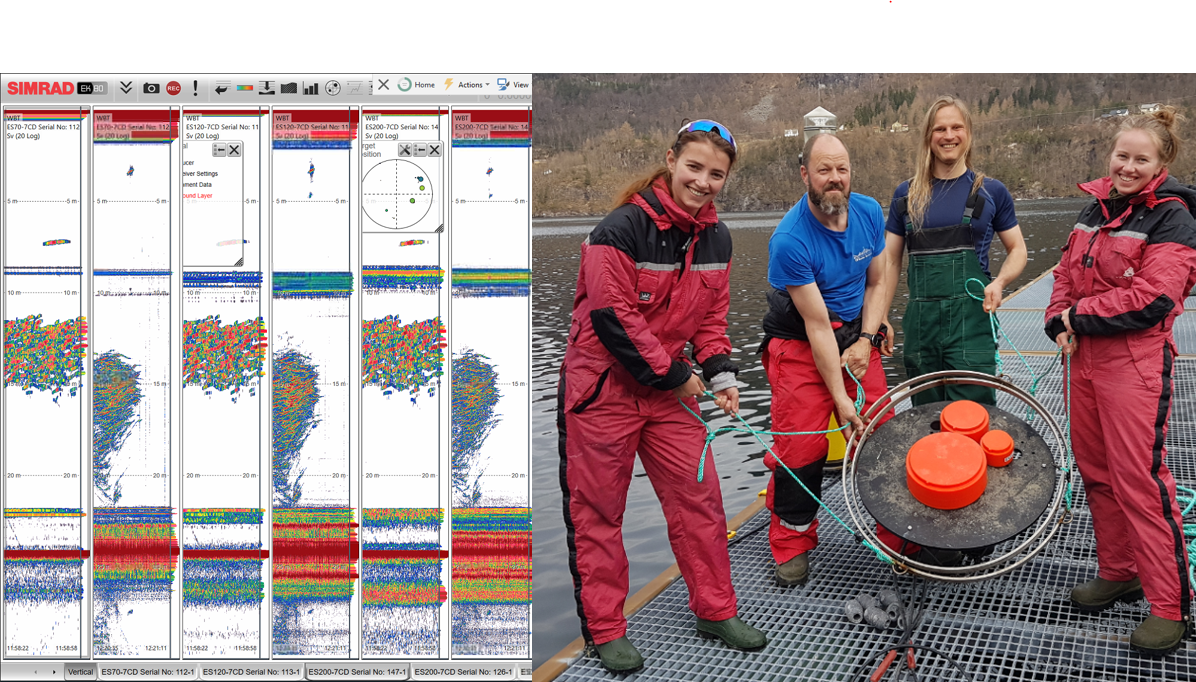
Vi vil utføra eksperimentelle målingar i tankar og merder ved HI sine forskingsanlegg i Austevoll og Matre, og til havs frå forskingsfartøy. Forbetring av eksisterande instrument vil væra nødvendig, som bruk av svingarar med smalare opningsvinkel og bruk av pulskomprimerte breidbandssignal for høg rekkeviddeoppløysing. Nye svingarar med auka bandbreidde vil verta utvikla og nytta i denne arbeidspakken. Måling på spreiing frå ikkje-dorsale vinklar er viktig, til dømes ved horisontal-sjåande ekkolodd innan ringnotfiskeri.
WP3: Validering av akustiske mål
Ansvarleg: Maria Tenningen
Forskingsspørsmål: Kva organismar generer signala?
Arbeidspakken vil utvikla og implementera teknikkar for å identifisera kva mål som generer det akustiske signalet. Dette vil inkludera optiske verifiseringsverktøy. Desse verktøya vil verta integrert i ei rekke prøvetakingsplattformer (til dømes AUV-er, USV-er, trålar og stasjonær utplassering i merder). Arbeidspakken vil også utvikla nøyaktige trålbaserte prøvetakingsmetodar, inkludert kontroll på trålgeometri og posisjonering, og aktive prøvetakingsmetoder som sikrar representativ prøvetaking frå ulike djup.
Arbeidspakken skal også evaluera og vidareutvikla prøvetakingsmetodar for akustiske undersøkingar, inkludert videotråling og prøvetakingsmetoder for autonome plattformer. Dette vil krevja forståing av korleis ulike artar og storleiker reagerer på ulike fiskereiskapar.
Arbeidspakken involverer tett samarbeid med industripartnarane og har som mål å identifisera bruksområde for kommersielt fiskeri.
WP4: Maskinlæring og artsklassifisering
Responsible: Nils Olav Handegard
Forskingsspørsmål: Kan maskinlæringsteknikkar nyttast til akustisk målklassifisering?
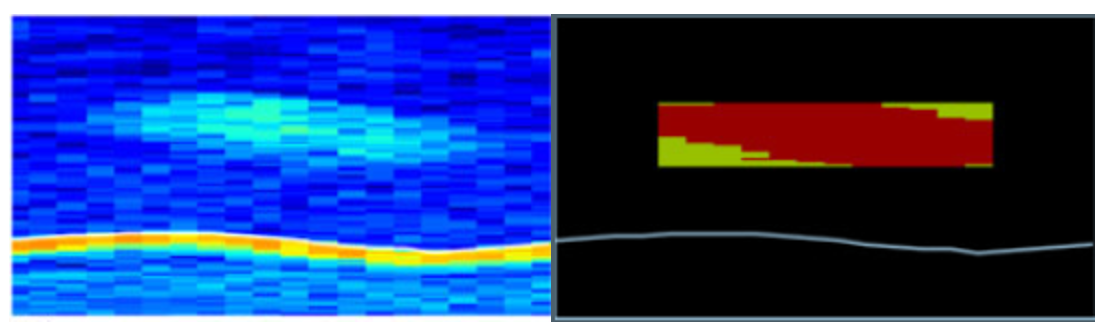
Arbeidspakken vil nytta maskinlæringsverktøy på store mengder akustiske data, med fokus på å kategorisera akustisk tilbakespreiing. Det fyrste trinnet vil være å førebu datasetta frå lange tidseriar av akustiske undersøkingar, både fleirfrekvens og breidband, og førebu desse for effektiv tilgang til moderne maskinlæringsbibliotek.
Neste steg er å vidareutvikla maskinlæringsmetodar, ved å nytta ein kombinasjon av historiske data, eksperimentelle data og optiske valideringsmetodar. Målet er å automatisk kategorisera akustiske data, og teste det på tidsseriane frå standard tokt. Neste trinn vil være å utvikle algoritmar for å trekka ut klassar som ikkje er manuelt annotert. Dette vil særleg væra aktuelt for deteksjon av støy, gasslekkasjar, planktonlag og andre ikkje-merka kategoriar. Ved å gruppera historiske data og
samanlikna klassane med klassane basert på breidbandsdata, forventar vi å sjå ei forbetring i kategoriseringa.
WP5: Autonome farkostar, tokt- og eksperimentelt-design
Ansvarleg: Espen Johnsen
Forskingsspørsmål: Korleis kan vi nytta akustiske sensorar på autonome plattformar, vurdera feilkjelder og måla åtferdsendringar mot ulike plattformar?

Akustiske sensorar høver godt på autonome og fjernstyrte plattformer. Plattformene kan enten køyrast frittståande eller saman med skip. Dei kan mellom anna nyttast som speidarfartøy for fiskeoperasjonar og for å utvide forskingsfartøy-baserte akustiske undersøkingar. Vi vil nytta ulike tilnærmingar for å nytta desse plattformene, inkludert ulike statiske og adaptive design.
For eksperiment eller økosystemovervaking er talfesting av uvissa sentralt. Korleis uvissa i automatisert akustisk målklassifisering forplantar seg til estimata vil bli undersøkt, og vi vil nytta undersøkingstidsseriar frå fleire HI tokt for å teste effekten av automatisering av målklassifisering.
Fisken si oppførsel påverkar ekkoet. Dette kan føra til feil i akustiske tokt, men det kan og nyttast til å måla åtferdsendringar, til dømes knytt til overvaking av fiskevelferd i akvakultur. Vi vil nytta modellering kombinert med observasjonar for å studera dette. Observasjonar inkluderer fleirstråleekkolodd, dopplermålingar, og signal frå breidbanda ekkolodd. Effekten av unnviking frå autonome farkostar vil verta undersøkt og vil vert samanlikna med unnviking frå forskings- og fiskefartøy.
Gevinstar for vitskap og industri
Ansvarleg: Tonny Algrøy
Industrispørsmål: Korleis kan innovasjonane i CRIMAC verta implementer i produkt av brukarpartnarane. Kva forskingsbehov har industrien?

Utvikling av produkt og tenester er motivasjonen til brukarpartnarane. Denne arbeidspakken støttar overgangen frå verifiserte metodar til produkt og tenester frå brukarpartnarane. Arbeidspakken legg til rette for ei nær kopling og tilbakemelding mellom CRIMAC-partnarane ved å tilpassa individuelle mål med den overordna SFI-strategien.
Arbeidspakken skal oppretthalda oversikt over brukarkrav for alle brukarpartnarane (inkludert HI som brukarpartner), og rapportera tilbake til leiinga. Oppgåva vil og være å halde oversikt over brukaraktiviteter og produkt som har fått støtte frå CRIMAC, og rapportera dette til kommunikasjonsgruppa.